Solid Mechanics Model¶
The solid mechanics model is a specific implementation of the Model interface dedicated to handle the equations of motion or
equations of equilibrium. The model is created for a given mesh. It will create
its own FEEngine object to compute the
interpolation, gradient, integration and assembly operations. A
SolidMechanicsModel object can simply
be created like this:
SolidMechanicsModel model(mesh);
where mesh is the mesh for which the equations are to be
solved. A second parameter called spatial_dimension can be
added after mesh if the spatial dimension of the problem is
different than that of the mesh.
This model contains at least the following six Arrays:
blocked_dofscontains a Boolean value for each degree of freedom specifying whether that degree is blocked or not. A Dirichlet boundary condition can be prescribed by setting the blocked_dofs value of a degree of freedom to
true. A Neumann boundary condition can be applied by setting the blocked_dofs value of a degree of freedom tofalse. The displacement, velocity and acceleration are computed for all degrees of freedom for which the blocked_dofs value is set tofalse. For the remaining degrees of freedom, the imposed values (zero by default after initialization) are kept.displacementcontains the displacements of all degrees of freedom. It can be either a computed displacement for free degrees of freedom or an imposed displacement in case of blocked ones (\(\vec{u}\) in the following).
velocitycontains the velocities of all degrees of freedom. As displacement, it contains computed or imposed velocities depending on the nature of the degrees of freedom (\(\dot{\vec{u}}\) in the following).
accelerationcontains the accelerations of all degrees of freedom. As displacement, it contains computed or imposed accelerations depending on the nature of the degrees of freedom (\(\ddot{\vec{u}}\) in the following).
external_forcecontains the external forces applied on the nodes (\(\vec{f}_{\st{ext}}\) in the following).
internal_forcecontains the internal forces on the nodes (\(\vec{f}_{\mathrm{int}}\) in the following).
Some examples to help to understand how to use this model will be
presented in the next sections. In addition to vector quantities, the solid
mechanics model can be queried for energies with the getEnergy which accepts an energy type as an
arguement (e.g. kinetic or potential).
Model Setup¶
Setting Initial Conditions¶
For a unique solution of the equations of motion, initial displacements and velocities for all degrees of freedom must be specified:
The solid mechanics model can be initialized as follows:
model.initFull()
This function initializes the internal arrays and sets them to zero. Initial displacements and velocities that are not equal to zero can be prescribed by running a loop over the total number of nodes. Here, the initial displacement in \(x\)-direction and the initial velocity in \(y\)-direction for all nodes is set to \(0.1\) and \(1\), respectively:
auto & disp = model.getDisplacement();
auto & velo = model.getVelocity();
for (Int node = 0; node < mesh.getNbNodes(); ++node) {
disp(node, 0) = 0.1;
velo(node, 1) = 1.;
}
Setting Boundary Conditions¶
This section explains how to impose Dirichlet or Neumann boundary conditions. A Dirichlet boundary condition specifies the values that the displacement needs to take for every point \(x\) at the boundary (\(\Gamma_u\)) of the problem domain (Fig. 6):
A Neumann boundary condition imposes the value of the gradient of the solution at the boundary \(\Gamma_t\) of the problem domain (Fig. 6):

Fig. 6 Problem domain \(\Omega\) with boundary in three dimensions. The Dirchelet and the Neumann regions of the boundary are denoted with \(\Gamma_u\) and \(\Gamma_t\), respecitvely.¶
Different ways of imposing these boundary conditions exist. A basic way is to loop over nodes or elements at the boundary and apply local values. A more advanced method consists of using the notion of the boundary of the mesh. In the following both ways are presented.
Starting with the basic approach, as mentioned, the Dirichlet boundary
conditions can be applied by looping over the nodes and assigning the
required values. Fig. 7 shows a beam with a
fixed support on the left side. On the right end of the beam, a load
is applied. At the fixed support, the displacement has a given
value. For this example, the displacements in both the \(x\) and the
\(y\)-direction are set to zero. Implementing this displacement boundary
condition is similar to the implementation of initial displacement
conditions described above. However, in order to impose a displacement
boundary condition for all time steps, the corresponding nodes need to
be marked as boundary nodes using the function blocked. While,
in order to impose a load on the right side, the nodes are not marked.
The detail codes are shown as follows
auto & blocked = model.getBlockedDOFs();
const auto & pos = mesh.getNodes();
UInt nb_nodes = mesh.getNbNodes();
for (Int node = 0; node < nb_nodes; ++node) {
if(Math::are_float_equal(pos(node, _x), 0)) {
blocked(node, _x) = true; // block dof in x-direction
blocked(node, _y) = true; // block dof in y-direction
disp(node, _x) = 0.; // fixed displacement in x-direction
disp(node, _y) = 0.; // fixed displacement in y-direction
} else if (Math::are_float_equal(pos(node, _y), 0)) {
blocked(node, _x) = false; // unblock dof in x-direction
forces(node, _x) = 10.; // force in x-direction
}
}

Fig. 7 Beam with fixed support and load.¶
For the more advanced approach, one needs the notion of a boundary in
the mesh. Therefore, the boundary should be created before boundary
condition functors can be applied. Generally the boundary can be
specified from the mesh file or the geometry. For the first case, the
function createGroupsFromMeshData is called. This function
can read any types of mesh data which are provided in the mesh
file. If the mesh file is created with Gmsh, the function takes one
input strings which is either tag_0, tag_1 or
physical_names. The first two tags are assigned by Gmsh to
each element which shows the physical group that they belong to. In
Gmsh, it is also possible to consider strings for different groups of
elements. These elements can be separated by giving a string
physical_names to the function
createGroupsFromMeshData
mesh.createGroupsFromMeshData<std::string>("physical_names").
Boundary conditions support can also be created from the geometry by calling
createBoundaryGroupFromGeometry. This function gathers all the elements on
the boundary of the geometry.
To apply the required boundary conditions, the function applyBC needs to be called on a
SolidMechanicsModel. This function
gets a Dirichlet or Neumann functor and a string which specifies the desired
boundary on which the boundary conditions is to be applied. The functors specify
the type of conditions to apply. Three built-in functors for Dirichlet exist:
FlagOnly, FixedValue and IncrementValue. The functor FlagOnly is used if a
point is fixed in a given direction. Therefore, the input parameter to this
functor is only the fixed direction. The FixedValue functor is used when a
displacement value is applied in a fixed direction. The IncrementValue
applies an increment to the displacement in a given direction. The following
code shows the utilization of three functors for the top, bottom and side
surface of the mesh which were already defined in the Gmsh
model.applyBC(BC::Dirichlet::FixedValue(13.0, _y), "Top");
model.applyBC(BC::Dirichlet::FlagOnly(_x), "Bottom");
model.applyBC(BC::Dirichlet::IncrementValue(13.0, _x), "Side");
To apply a Neumann boundary condition, the applied traction or stress should be
specified before. In case of specifying the traction on the surface, the functor
FromTraction of Neumann
boundary conditions is called. Otherwise, the functor FromStress should be called which gets the stress tensor
as an input parameter
Vector<Real> surface_traction{0., 0., 1.};
auto surface_stress(3, 3) = Matrix<Real>::eye(3);
model.applyBC(BC::Neumann::FromTraction(surface_traction), "Bottom");
model.applyBC(BC::Neumann::FromStress(surface_stress), "Top");
If the boundary conditions need to be removed during the simulation, a functor is called from the Neumann boundary condition to free those boundary conditions from the desired boundary
model.applyBC(BC::Neumann::FreeBoundary(), "Side");
User specified functors can also be implemented. A full example for
setting both initial and boundary conditions can be found in
examples/boundary_conditions.cc. The problem solved
in this example is shown in Fig. 8. It consists
of a plate that is fixed with movable supports on the left and bottom
side. On the right side, a traction, which increases linearly with the
number of time steps, is applied. The initial displacement and
velocity in \(x\)-direction at all free nodes is zero and two
respectively.

Fig. 8 Plate on movable supports.¶
As it is mentioned in Section ref{sect:common:groups}, node and element groups can be used to assign the boundary conditions. A generic example is given below with a Dirichlet boundary condition:
// create a node group
NodeGroup & node_group = mesh.createNodeGroup("nodes_fix");
/* fill the node group with the nodes you want */
// create an element group using the existing node group
mesh.createElementGroupFromNodeGroup("el_fix",
"nodes_fix",
spatial_dimension-1);
// boundary condition can be applied using the element group name
model.applyBC(BC::Dirichlet::FixedValue(0.0, _x), "el_fix");
Material Selector¶
If the user wants to assign different materials to different
finite elements groups in Akantu, a material selector has to be
used. By default, Akantu assigns the first valid material in the
material file to all elements present in the model (regular continuum
materials are assigned to the regular elements and cohesive materials
are assigned to cohesive elements or element facets).
To assign different materials to specific elements, mesh data information such
as tag information or specified physical names can be used.
MeshDataMaterialSelector class
uses this information to assign different materials. With the proper physical
name or tag name and index, different materials can be assigned as demonstrated
in the examples below:
auto mat_selector =
std::make_shared<MeshDataMaterialSelector<std::string>>("physical_names",
model);
model.setMaterialSelector(mat_selector);
In this example the physical names specified in a GMSH geometry file will by used to match the material names in the input file.
Another example would be to use the first (tag_0) or the second
(tag_1) tag associated to each elements in the mesh:
auto mat_selector = std::make_shared<MeshDataMaterialSelector<UInt>>(
"tag_1", model, first_index);
model.setMaterialSelector(*mat_selector);
where first_index (default is 1) is the value of tag_1 that will
be associated to the first material in the material input file. The following
values of the tag will be associated with the following materials.
There are four different material selectors pre-defined in Akantu.
MaterialSelector and
DefaultMaterialSelector is used
to assign a material to regular elements by default. For the regular elements,
as in the example above, MeshDataMaterialSelector can be used to assign different materials to
different elements.
Apart from the Akantu’s default material selectors, users can always
develop their own classes in the main code to tackle various
multi-material assignment situations.
For cohesive material, Akantu has a pre-defined material selector to assign
the first cohesive material by default to the cohesive elements which is called
DefaultMaterialCohesiveSelector and it inherits its properties from
DefaultMaterialSelector. Multiple
cohesive materials can be assigned using mesh data information (for more
details, see Intrinsic approach).
Insertion of Cohesive Elements¶
Cohesive elements are currently compatible only with static simulation and dynamic simulation with an explicit time integration scheme (see section Explicit Time Integration). They do not have to be inserted when the mesh is generated (intrinsic) but can be added during the simulation (extrinsic). At any time during the simulation, it is possible to access the following energies with the relative function:
Real Ed = model.getEnergy("dissipated");
Real Er = model.getEnergy("reversible");
Real Ec = model.getEnergy("contact");
A new model have to be call in a very similar way that the solid mechanics model:
SolidMechanicsModelCohesive model(mesh);
model.initFull(_analysis_method = _explicit_lumped_mass,
_is_extrinsic = true);
Cohesive element insertion can be either realized at the beginning of
the simulation or it can be carried out dynamically during the
simulation. The first approach is called intrinsic, the second
one extrinsic. When an element is present from the beginning, a
bi-linear or exponential cohesive law should be used instead of a
linear one. A bi-linear law works exactly like a linear one except for
an additional parameter \(\delta_0\) separating an initial linear
elastic part from the linear irreversible one. For additional details
concerning cohesive laws see Section~ref{sec:cohesive-laws}.

Fig. 9 Insertion of a cohesive element.¶
Extrinsic cohesive elements are dynamically inserted between two standard elements when
in which \(\sigma_\mathrm { n } \)).
Extrinsic approach¶
During the simulation, stress has to be checked along each facet in order to
insert cohesive elements where the stress criterion is reached. This check is
performed by calling the method checkCohesiveStress, as example before
each step resolution:
model.checkCohesiveStress();
model.solveStep();
The area where stresses are checked and cohesive elements inserted can be
limited using the method setLimit on the CohesiveInserter during initialization. As example, to limit
insertion in the range \([-1.5, 1.5]\) in the $x$ direction:
auto & inserter = model.getElementInserter();
inserter.setLimit(_x, -1.5, 1.5);
Additional restrictions with respect to \(_y\) and \(_z\) directions can be added as well.
Intrinsic approach¶
Intrinsic cohesive elements are inserted in the mesh with the method
initFull.
Similarly, the range of insertion can be limited with setLimit before the initFull call.
In both cases extrinsic and intrinsic the insertion can be restricted to surfaces or element groups. To do so the list of groups should be specified in the input file.
model solid_mechanics_model_cohesive [
cohesive_inserter [
cohesive_surfaces = [surface1, surface2, ...]
cohesive_zones = [group1, group2, ...]
]
material cohesive_linear [
name = insertion
beta = 1
G_c = 10
sigma_c = 1e6
]
]
Static Analysis¶
The SolidMechanicsModel class can
handle different analysis methods, the first one being presented is the static
case. In this case, the equation to solve is
where \(\mat{K}\) is the global stiffness matrix, \(\vec{u}\) the displacement vector and \(\vec{f}_{\st{ext}}\) the vector of external forces applied to the system.
To solve such a problem, the static solver of the
SolidMechanicsModel object is used.
First, a model has to be created and initialized. To create the model, a mesh
(which can be read from a file) is needed, as explained in
Section~ref{sect:common:mesh}. Once an instance of a
SolidMechanicsModel is obtained, the
easiest way to initialize it is to use the initFull method by giving the
SolidMechanicsModelOptions.
These options specify the type of analysis to be performed and whether the
materials should be initialized with initMaterials or not
SolidMechanicsModel model(mesh);
model.initFull(_analysis_method = _static);
Here, a static analysis is chosen by passing the argument
_static to the method. By default, the
Boolean for no initialization of the materials is set to false, so that they are
initialized during the initFull. The method initFull also initializes
all appropriate vectors to zero. Once the model is created and initialized, the
boundary conditions can be set as explained in Section Setting Boundary Conditions.
Boundary conditions will prescribe the external forces for some free degrees of
freedom \(\vec{f}_{\st{ext}}\) and displacements for some others. At this
point of the analysis, the function
solveStep can be called
auto & solver = model.getNonLinearSolver();
solver.set("max_iterations", 1);
solver.set("threshold", 1e-4);
solver.set("convergence_type", SolveConvergenceCriteria::_residual);
model.solveStep();
This function is templated by the solving method and the convergence criterion and takes two arguments: the tolerance and the maximum number of iterations (100 by default), which are \(10^{-4}\) and \(1\) for this example. The modified Newton-Raphson method is chosen to solve the system. In this method, the equilibrium equation (Eq. 1) is modified in order to apply a Newton-Raphson convergence algorithm:
where \(\delta\vec{u}\) is the increment of displacement to be added from
one iteration to the other, and \(i\) is the Newton-Raphson iteration
counter. By invoking the solveStep method in the first step, the global
stiffness matrix \(\mat{K}\) from (Eq. 1) is automatically
assembled. A Newton-Raphson iteration is subsequently started, \(\mat{K}\)
is updated according to the displacement computed at the previous iteration and
one loops until the forces are balanced
(SolveConvergenceCriteria::_residual), i.e. \(||\vec{r}|| <\)
threshold. One can also
iterate until the increment of displacement is zero
(SolveConvergenceCriteria::_solution) which also means that the
equilibrium is found. For a linear elastic problem, the solution is obtained in
one iteration and therefore the maximum number of iterations can be set to one.
But for a non-linear case, one needs to iterate as long as the norm of the
residual exceeds the tolerance threshold and therefore the maximum number of
iterations has to be higher, e.g. \(100\)
solver.set("max_iterations", 100);
model.solveStep();
At the end of the analysis, the final solution is stored in the
displacement vector. A full example of how to solve a static
problem is presented in the code examples/static/static.cc.
This example is composed of a 2D plate of steel, blocked with rollers
on the left and bottom sides as shown in Fig. 10.
The nodes from the right side of the sample are displaced by \(0.01\%\)
of the length of the plate.

Fig. 10 Numerical setup.¶
The results of this analysis is depicted in Fig. 11.
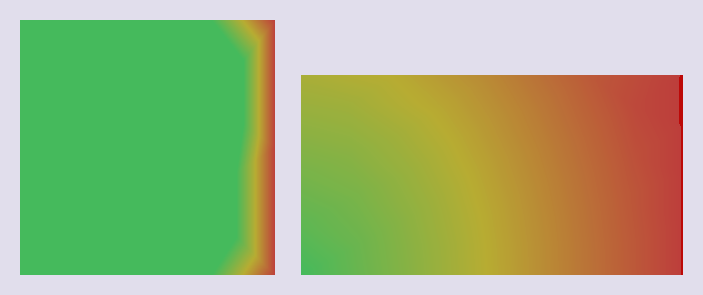
Fig. 11 Solution of the static analysis. Left: the initial condition, right: the solution (deformation magnified 50 times).¶
Dynamic Methods¶
Different ways to solve the equations of motion are implemented in the solid mechanics model. The complete equations that should be solved are:
where \(\mat{M}\), \(\mat{C}\) and \(\mat{K}\) are the mass, damping and stiffness matrices, respectively.
In the previous section, it has already been discussed how to solve this
equation in the static case, where \(\ddot{\vec{u}} = \dot{\vec{u}} = 0\).
Here the method to solve this equation in the general case will be presented.
For this purpose, a time discretization has to be specified. The most common
discretization method in solid mechanics is the Newmark-\(\beta\) method,
which is also the default in Akantu.
For the Newmark-\(\beta\) method, (Eq. 2) becomes a system of three equations (see [Cur92, HB83] for more details):
In these new equations, \(\ddot{\vec{u}}_{n}\), \(\dot{\vec{u}}_{n}\) and \(\vec{u}_{n}\) are the approximations of \(\ddot{\vec{u}}(t_n)\), \(\dot{\vec{u}}(t_n)\) and \(\vec{u}(t_n)\). Equation~(Eq. 3) is the equation of motion discretized in space (finite-element discretization), and the equations above are discretized in both space and time (Newmark discretization). The \(\alpha\) and \(\beta\) parameters determine the stability and the accuracy of the algorithm. Classical values for \(\alpha\) and \(\beta\) are usually \(\beta = 1/2\) for no numerical damping and \(0 < \alpha < 1/2\).
\(\alpha\) |
Method (\(\beta = 1/2\)) |
Type |
|---|---|---|
\(0\) |
central difference |
explicit |
\(\frac{1}{6}\) |
Fox-Goodwin(royal road) |
implicit |
\(\frac{1}{3}\) |
Linear acceleration |
implicit |
\(\frac{1}{2}\) |
Average acceleration (trapeziodal rule) |
implicit |
The solution of this system of equations, (Eq. 3) is split into a predictor and a corrector system of equations. Moreover, in the case of a non-linear equations, an iterative algorithm such as the Newton-Raphson method is applied. The system of equations can be written as:
Predictor:
\[\begin{split}\vec{u}_{n+1}^{0} &= \vec{u}_{n} + \Delta t \dot{\vec{u}}_{n} + \frac{\Delta t^2}{2} \ddot{\vec{u}}_{n} \\ \dot{\vec{u}}_{n+1}^{0} &= \dot{\vec{u}}_{n} + \Delta t \ddot{\vec{u}}_{n} \\ \ddot{\vec{u}}_{n+1}^{0} &= \ddot{\vec{u}}_{n}\end{split}\]Solve:
\[\begin{split}\left(c \mat{M} + d \mat{C} + e \mat{K}_{n+1}^i\right) \vec{w} &= {\vec{f}_{\st{ext}}}_{\,n+1} - {\vec{f}_{\st{int}}}_{\,n+1}^i - \mat{C} \dot{\vec{u}}_{n+1}^i - \mat{M} \ddot{\vec{u}}_{n+1}^i\\ &= \vec{r}_{n+1}^i\end{split}\]Corrector:
\[\begin{split}\ddot{\vec{u}}_{n+1}^{i+1} &= \ddot{\vec{u}}_{n+1}^{i} +c \vec{w} \\ \dot{\vec{u}}_{n+1}^{i+1} &= \dot{\vec{u}}_{n+1}^{i} + d\vec{w} \\ \vec{u}_{n+1}^{i+1} &= \vec{u}_{n+1}^{i} + e \vec{w}\end{split}\]
where \(i\) is the Newton-Raphson iteration counter and \(c\), \(d\) and \(e\) are parameters depending on the method used to solve the equations
\(\vec{w}\) |
\(e\) |
\(d\) |
\(c\) |
|
|---|---|---|---|---|
in acceleration |
\(\delta\ddot{\vec{u}}\) |
\(\alpha\beta\Delta t^2\) |
\(\beta\Delta t\) |
\(1\) |
in velocity |
\(\delta\dot{\vec{u}}\) |
\(\alpha\Delta t\) |
\(1\) |
\(\frac{1}{\beta\Delta t}\) |
in displacement |
\(\delta\vec{u}\) |
\(1\) |
\(\frac{1}{\alpha\Delta t}\) |
\(\frac{1}{\alpha\beta \Delta t^2}\) |
Note
If you want to use the implicit solver Akantu should be compiled at
least with one sparse matrix solver such as Mumps [spa].
Implicit Time Integration¶
To solve a problem with an implicit time integration scheme, first a
SolidMechanicsModel object has to be
created and initialized. Then the initial and boundary conditions have to be
set. Everything is similar to the example in the static case
(Section~ref{sect:smm:static}), however, in this case the implicit dynamic
scheme is selected at the initialization of the model:
SolidMechanicsModel model(mesh);
model.initFull(_analysis_method = _implicit_dynamic);
Because a dynamic simulation is conducted, an integration time step
\(\Delta t\) has to be specified. In the case of implicit simulations,
Akantu implements a trapezoidal rule by default. That is to say
\(\alpha = 1/2\) and \(\beta = 1/2\) which is unconditionally
stable. Therefore the value of the time step can be chosen arbitrarily
within reason:
model.setTimeStep(time_step);
Since the system has to be solved for a given amount of time steps, the
method solveStep(), (which has already been used in the static
example in Section~ref{sect:smm:static}), is called inside a time
loop:
/// time loop
Real time = 0.;
auto & solver = model.getNonLinearSolver();
solver.set("max_iterations", 100);
solver.set("threshold", 1e-12);
solver.set("convergence_type", SolveConvergenceCriteria::_solution);
for (Int s = 1; time <max_time; ++s, time += time_step) {
model.solveStep();
}
An example of solid mechanics with an implicit time integration scheme is
presented in examples/implicit/implicit_dynamic.cc. This example consists of
a 3D beam of
\(10\mathrm{m}\times1\mathrm{m}\times1\mathrm{m}\) blocked
on one side and is on a roller on the other side. A constant force of
\(5\mathrm{kN}\) is applied in its middle.
Fig. 12 presents the geometry of this case. The
material used is a fictitious linear elastic material with a density of
\(1000 \mathrm{kg/m}^3\), a Young’s Modulus of
\(120 \mathrm{MPa}\) and Poisson’s ratio of \(0.3\). These values
were chosen to simplify the analytical solution.
An approximation of the dynamic response of the middle point of the beam is given by:

Fig. 12 Numerical setup.¶
Fig. 13 presents the deformed beam at 3 different times during the simulation: time steps 0, 1000 and 2000.
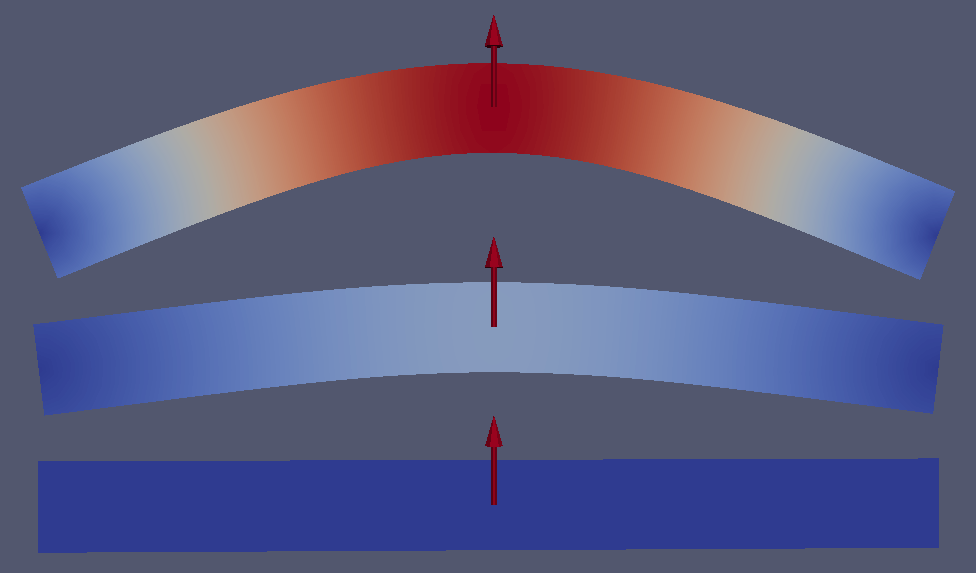
Fig. 13 Deformed beam at three different times (displacement \(\times 10\)).¶
Explicit Time Integration¶
The explicit dynamic time integration scheme is based on the
Newmark-\(\beta\) scheme with \(\alpha=0\) (see equations
ref{eqn:equation-motion-discret}-ref{eqn:finite-difference-2}). In
Akantu, \(\beta\) is defaults to \(\beta=1/2\), see section
ref{sect:smm:Dynamic_methods}.
The initialization of the simulation is similar to the static and implicit
dynamic version. The model is created from the SolidMechanicsModel class. In the initialization, the explicit scheme
is selected using the _explicit_lumped_mass constant:
SolidMechanicsModel model(mesh);
model.initFull(_analysis_method = _explicit_lumped_mass);
Note
Writing model.initFull() or model.initFull(); is
equivalent to use the _explicit_lumped_mass keyword, as this
is the default case.
The explicit time integration scheme implemented in Akantu uses a
lumped mass matrix \(\mat{M}\) (reducing the computational cost). This
matrix is assembled by distributing the mass of each element onto its
nodes. The resulting \(\mat{M}\) is therefore a diagonal matrix stored
in the mass vector of the model.
The explicit integration scheme is conditionally stable. The time step has to be smaller than the stable time step which is obtained in Akantu as follows:
critical_time_step = model.getStableTimeStep();
The stable time step corresponds to the time the fastest wave (the compressive wave) needs to travel the characteristic length of the mesh:
where \(\Delta x\) is a characteristic length (eg the inradius in the case of linear triangle element) and \(c\) is the celerity of the fastest wave in the material. It is generally the compressive wave of celerity \(c = \sqrt{\frac{2 \mu + \lambda}{\rho}}\), \(\mu\) and \(\lambda\) are the first and second Lame’s coefficients and \(\rho\) is the density. However, it is recommended to impose a time step that is smaller than the stable time step, for instance, by multiplying the stable time step by a safety factor smaller than one:
const Real safety_time_factor = 0.8;
Real applied_time_step = critical_time_step * safety_time_factor;
model.setTimeStep(applied_time_step);
The initial displacement and velocity fields are, by default, equal to zero if not given specifically by the user (see ref{sect:smm:initial_condition}).
Like in implicit dynamics, a time loop is used in which the
displacement, velocity and acceleration fields are updated at each
time step. The values of these fields are obtained from the
Newmark:math:-beta equations with \(\beta=1/2\) and \(\alpha=0\). In Akantu
these computations at each time step are invoked by calling the
function solveStep:
for (Int s = 1; (s-1)*applied_time_step < total_time; ++s) {
model.solveStep();
}
The method solveStep wraps the four following functions:
model.explicitPred()allows to compute the displacement field at \(t+1\) and a part of the velocity field at \(t+1\), denoted by \(\vec{\dot{u}^{\st{p}}}_{n+1}\), which will be used later in the methodmodel.explicitCorr(). The equations are:\[\begin{split}\vec{u}_{n+1} &= \vec{u}_{n} + \Delta t \vec{\dot{u}}_{n} + \frac{\Delta t^2}{2} \vec{\ddot{u}}_{n}\\ \vec{\dot{u}^{\st{p}}}_{n+1} &= \vec{\dot{u}}_{n} + \Delta t \vec{\ddot{u}}_{n}\end{split}\]model.updateResidual()andmodel.updateAcceleration()compute the acceleration increment \(\delta \vec{\ddot{u}}\):\[\left(\mat{M} + \frac{1}{2} \Delta t \mat{C}\right) \delta \vec{\ddot{u}} = \vec{f_{\st{ext}}} - \vec{f}_{\st{int}\, n+1} - \mat{C} \vec{\dot{u}^{\st{p}}}_{n+1} - \mat{M} \vec{\ddot{u}}_{n}\]- The internal force \(\vec{f}_{\st{int}\, n+1}\) is computed from the
displacement \(\vec{u}_{n+1}\) based on the constitutive law.
model.explicitCorr()computes the velocity and acceleration fields at \(t+1\):\[\begin{split}\vec{\dot{u}}_{n+1} &= \vec{\dot{u}^{\st{p}}}_{n+1} + \frac{\Delta t}{2} \delta \vec{\ddot{u}} \\ \vec{\ddot{u}}_{n+1} &= \vec{\ddot{u}}_{n} + \delta \vec{\ddot{u}}\end{split}\]
The use of an explicit time integration scheme is illustrated by the example:
examples/explicit/explicit_dynamic.cc. This example models the propagation
of a wave in a steel beam. The beam and the applied displacement in the
\(x\) direction are shown in Fig. 14.

Fig. 14 Numerical setup.¶
The length and height of the beam are \(L={10}\textrm{m}\) and \(h = {1}\textrm{m}\), respectively. The material is linear elastic, homogeneous and isotropic (density: \(7800\mathrm{kg/m}^3\), Young’s modulus: \(210\mathrm{GPa}\) and Poisson’s ratio: \(0.3\)). The imposed displacement follow a Gaussian function with a maximum amplitude of \(A = {0.01}\textrm{m}\). The potential, kinetic and total energies are computed. The safety factor is equal to \(0.8\).
Constitutive Laws¶
In order to compute an element’s response to deformation, one needs to use an appropriate constitutive relationship. The constitutive law is used to compute the element’s stresses from the element’s strains.
In the finite-element discretization, the constitutive formulation is applied to every quadrature point of each element. When the implicit formulation is used, the tangent matrix has to be computed.
element_material vector. For
every material assigned to the problem one has to specify the material
characteristics (constitutive behavior and material properties) using
the text input file (see Material section).Akantu provides a special data structure, the at InternalField. The internal fields are inheriting from the at
ElementTypeMapArray. Furthermore,
it provides several functions for initialization, auto-resizing and auto
removal of quadrature points.The constitutive law is precised within an input file. The dedicated material section
is then read by initFull
method of SolidMechanicsModel which
initializes the different materials specified with the following convention
material constitutive_law [
name = value
rho = value
...
]
where constitutive_law is the adopted constitutive law, followed by
the material properties listed one by line in the bracket (e.g.,
name and density :math:rho. Some constitutive laws can also
have an optional flavor.
For certain materials, it is possible to activate the large deformation strain and stress evaluations. Internally the strain measure becomes the right Cauchy–Green deformation tensor and the evaluated stress measure becomes the Piola-Kirchhoff stress tensor. This is activated by using:
material constitutive_law [
finite_deformation = true # Activates the large deformation routines (bool)
...
]
Sometimes it is also desired to generate random distributions of internal parameters. An example might be the critical stress at which the material fails. To generate such a field, in the text input file, a random quantity needs be added to the base value:
All parameters are real numbers. For the uniform distribution, minimum and maximum values have to be specified. Random parameters are defined as a \(base\) value to which we add a random number that follows the chosen distribution.
The Uniform distribution is gives a random values between in \([min, max)\). The Weibull distribution is characterized by the following cumulative distribution function:
which depends on \(m\) and \(\lambda\), which are the shape parameter and the scale parameter. These random distributions are different each time the code is executed. In order to obtain always the same one, it possible to manually set the seed that is the number from which these pseudo-random distributions are created. This can be done by adding the following line to the input file outside the material parameters environments:
seed = 1.0
where the value 1.0 can be substituted with any number. Currently
Akantu can reproduce always the same distribution when the seed is
specified only in serial. The value of the seed can be also
specified directly in the code (for instance in the main file) with the
command:
RandGenerator<Real>::seed(1.0)
The same command, with empty brackets, can be used to check the value of the seed used in the simulation.
The following sections describe the constitutive models implemented in
Akantu.
Elastic¶
The elastic law is a commonly used constitutive relationship that can be used for a wide range of engineering materials (e.g., metals, concrete, rock, wood, glass, rubber, etc.) provided that the strains remain small (i.e., small deformation and stress lower than yield strength).
The elastic laws are often expressed as \(\boldsymbol{\sigma} = \boldsymbol{C}:\boldsymbol{\varepsilon}\) with where \(\boldsymbol{\sigma}\) is the Cauchy stress tensor, \(\boldsymbol{\varepsilon}\) represents the infinitesimal strain tensor and \(\boldsymbol{C}\) is the elastic modulus tensor.
Linear isotropic¶
Keyword: elastic
Material description with input file:
#input.dat
material elastic [
name = steel
rho = 7800 # density (Real)
E = 2.1e11 # young's modulus (Real)
nu = 0.3 # poisson's ratio (Real)
Plane_stress = false # Plane stress simplification (only 2D problems) (bool)
finite_deformation = false # activates the evaluation of strains with green's tensor (bool)
]
Available energies Energies:
potential: elastic potential energy
The linear isotropic elastic behavior is described by Hooke’s law, which states that the stress is linearly proportional to the applied strain (material behaves like an ideal spring), as illustrated in Fig. 15.

Fig. 15 Stress-strain curve of elastic material and schematic representation of Hooke’s law, denoted as a spring.¶
The equation that relates the strains to the displacements is: point) from the displacements as follows:
where \(\boldsymbol{\varepsilon}\) represents the infinitesimal strain tensor, \(\nabla_{0}\boldsymbol{u}\) the displacement gradient tensor according to the initial configuration. The constitutive equation for isotropic homogeneous media can be expressed as:
where \(\boldsymbol{\sigma}\) is the Cauchy stress tensor (\(\lambda\) and \(\mu\) are the the first and second Lame’s coefficients).
In Voigt notation this correspond to
This formulation is not sufficient to represent all elastic material behavior. Some materials have characteristic orientation that have to be taken into account. To represent this anisotropy a more general stress-strain law has to be used, as shown below.
Linear anisotropic¶
Keyword: elastic_anisotropic
Material description with input file:
#input.dat
material elastic_anisotropic [
name = aluminum
rho = 1.6465129043044597 # density (Real)
C11 = 105.092023 # Coefficient ij of material tensor C (Real)
C12 = 59.4637759 # all the 36 values
C13 = 59.4637759 # in Voigt notation can be entered
C14 = 0 # zero coefficients can be omited
C15 = 0
C16 = 0
C22 = 105.092023
C23 = 59.4637759
C24 = 0
C25 = 0
C26 = 0
C33 = 105.092023
C34 = 0
C35 = 0
C36 = 0
C44 = 30.6596356
C45 = 0
C46 = 0
C55 = 30.6596356
C56 = 0
C66 = 30.6596356
n1 = [-1, 1, 0] # Direction of first material axis (Vector<Real>)
n2 = [ 1, 1, 1] # Direction of second material axis (Vector<Real>)
n3 = [ 1, 1, -2] # Direction of thrid material axis (Vector<Real>)
]
We define the elastic modulus tensor as follows:
To simplify the writing of input files the \(\boldsymbol{C}\) tensor is expressed in the material basis. And this basis as to be given too. This basis \(\Omega_{{\mathrm{mat}}} = \{\boldsymbol{n_1}, \boldsymbol{n_2}, \boldsymbol{n_3}\}\) is used to define the rotation \(R_{ij} = \boldsymbol{n_j} . \boldsymbol{e_i}\). And \(\boldsymbol{C}\) can be rotated in the global basis \(\Omega = \{\boldsymbol{e_1}, \boldsymbol{e_2}, \boldsymbol{e_3}\}\) as follow:
Linear orthotropic¶
Keyword: elastic_orthotropic
Inherits from elastic_anisotropic
Material description with input file:
#input.dat
material elastic_orthotropic [
name = test_mat_1
rho = 1 # density
n1 = [-1, 1, 0] # Direction of first material axis (Vector<Real>)
n2 = [ 1, 1, 1] # Direction of second material axis (Vector<Real>)
n3 = [ 1, 1, -2] # Direction of thrid material axis (Vector<Real>)
E1 = 1 # Young's modulus in direction n1 (Real)
E2 = 2 # Young's modulus in direction n2 (Real)
E3 = 3 # Young's modulus in direction n3 (Real)
nu12 = 0.1 # Poisson's ratio 12 (Real)
nu13 = 0.2 # Poisson's ratio 13 (Real)
nu23 = 0.3 # Poisson's ratio 23 (Real)
G12 = 0.5 # Shear modulus 12 (Real)
G13 = 1 # Shear modulus 13 (Real)
G23 = 2 # Shear modulus 23 (Real)
]
A particular case of anisotropy is when the material basis is orthogonal in which case the elastic modulus tensor can be simplified and rewritten in terms of 9 independents material parameters.
The Poisson ratios follow the rule \(\nu_{ij} = \nu_{ji} E_i / E_j\).
Neo-Hookean¶
Keyword: neohookean
Inherits from elastic
Material description with input file:
#input.dat
material neohookean [
name = material_name
rho = 7800 # density (Real)
E = 2.1e11 # young's modulus (Real)
nu = 0.3 # poisson's ratio (Real)
]
The hyperelastic Neo-Hookean constitutive law results from an extension of the linear elastic relationship (Hooke’s Law) for large deformation. Thus, the model predicts nonlinear stress-strain behavior for bodies undergoing large deformations.

Fig. 16 Neo-hookean Stress-strain curve.¶
As illustrated in Fig. 16, the behavior is initially linear and the mechanical behavior is very close to the corresponding linear elastic material. This constitutive relationship, which accounts for compressibility, is a modified version of the one proposed by Ronald Rivlin [TB00].
The strain energy stored in the material is given by:
where \(\lambda_0\) and \(\mu_0\) are, respectively, Lamé’s first parameter and the shear modulus at the initial configuration. \(J\) is the jacobian of the deformation gradient (\(\boldsymbol{F}=\nabla_{\!\!\boldsymbol{X}}\boldsymbol{x}\)): \(J=\text{det}(\boldsymbol{F})\). Finally \(\boldsymbol{C}\) is the right Cauchy-Green deformation tensor.
Since this kind of material is used for large deformation problems, a finite deformation framework should be used. Therefore, the Cauchy stress (\(\boldsymbol{\sigma}\)) should be computed through the second Piola-Kirchhoff stress tensor \(\boldsymbol{S}\):
Finally the second Piola-Kirchhoff stress tensor is given by:
The parameters to indicate in the material file are the same as those
for the elastic case: E (Young’s modulus), nu (Poisson’s ratio).
Visco-Elastic¶
Standard-Linear Solid¶
Keyword: sls_deviatoric
Inherits from elastic
Material description with input file:
#input.dat
material sls_deviatoric [
name = material_name
rho = 1000 # density (Real)
E = 2.1e9 # young's modulus (Real)
nu = 0.4 # poisson's ratio (Real)
Eta = 1. # Viscosity (Real)
Ev = 0.5 # Stiffness of viscous element (Real)
Plane_stress = false # Plane stress simplification (bool, only 2D problems)
]
Since this material inherits from MaterialElastic the parameter \(E\) preceeds \(E_{\mathrm{inf}}\). So only \(E\)
and \(E_v\) can be set, \(E_{\mathrm{inf}}\) is deduced by \(E_{\mathrm{inf}} = E - E_{v}\).
Visco-elasticity is characterized by strain rate dependent behavior. Moreover, when such a material undergoes a deformation it dissipates energy. This dissipation results in a hysteresis loop in the stress-strain curve at every loading cycle (see Fig. 17). In principle, it can be applied to many materials, since all materials exhibit a visco-elastic behavior if subjected to particular conditions (such as high temperatures).

Fig. 17 Characteristic stress-strain behavior of a visco-elastic material with hysteresis loop¶

Fig. 18 Schematic representation of the standard rheological linear solid visco-elastic model¶
The standard rheological linear solid model (see Sections 10.2 and 10.3
of [SH92]) has been implemented in Akantu. This
model results from the combination of a spring mounted in parallel with
a spring and a dashpot connected in series, as illustrated in
Fig. 18.
The advantage of this model is that it allows to account for creep or
stress relaxation. The equation that relates the stress to the strain is
(in 1D):
where \(\eta\) is the viscosity. The equilibrium condition is unique and is
attained in the limit, as \(t \to \infty\). At this stage, the response is
elastic and depends on the Young’s modulus \(E\). The mandatory parameters
for the material file are the following: rho (density), E (Young’s
modulus), nu (Poisson’s ratio), Plane_Stress (if set to zero plane
strain, otherwise plane stress), eta (dashpot viscosity) and Ev
(stiffness of the viscous element).
Note that the current standard linear solid model is applied only on the deviatoric part of the strain tensor. The spheric part of the strain tensor affects the stress tensor like an linear elastic material.
Maxwell Chain Visco-Elasticity¶
Keyword: viscoelastic_maxwell
Inherits from elastic
Material description with input file:
#input.dat
material viscoelastic_maxwell [
name = material_name
rho = 1000 # density (Real)
Einf = 5.e9 # Infinite time Young's modulus (Real)
nu = 0.4 # poisson's ratio (Real)
Ev = [1.e9, 2.e9, 3.e9] # Maxwell elements' stiffness values (Vector<Real>)
Eta = [1.e14, 2.e16, 3.e16] # Dashpot elements' viscosity values (Vector<Real>)
Plane_stress = false # Plane stress simplification (bool, only 2D problems)
]
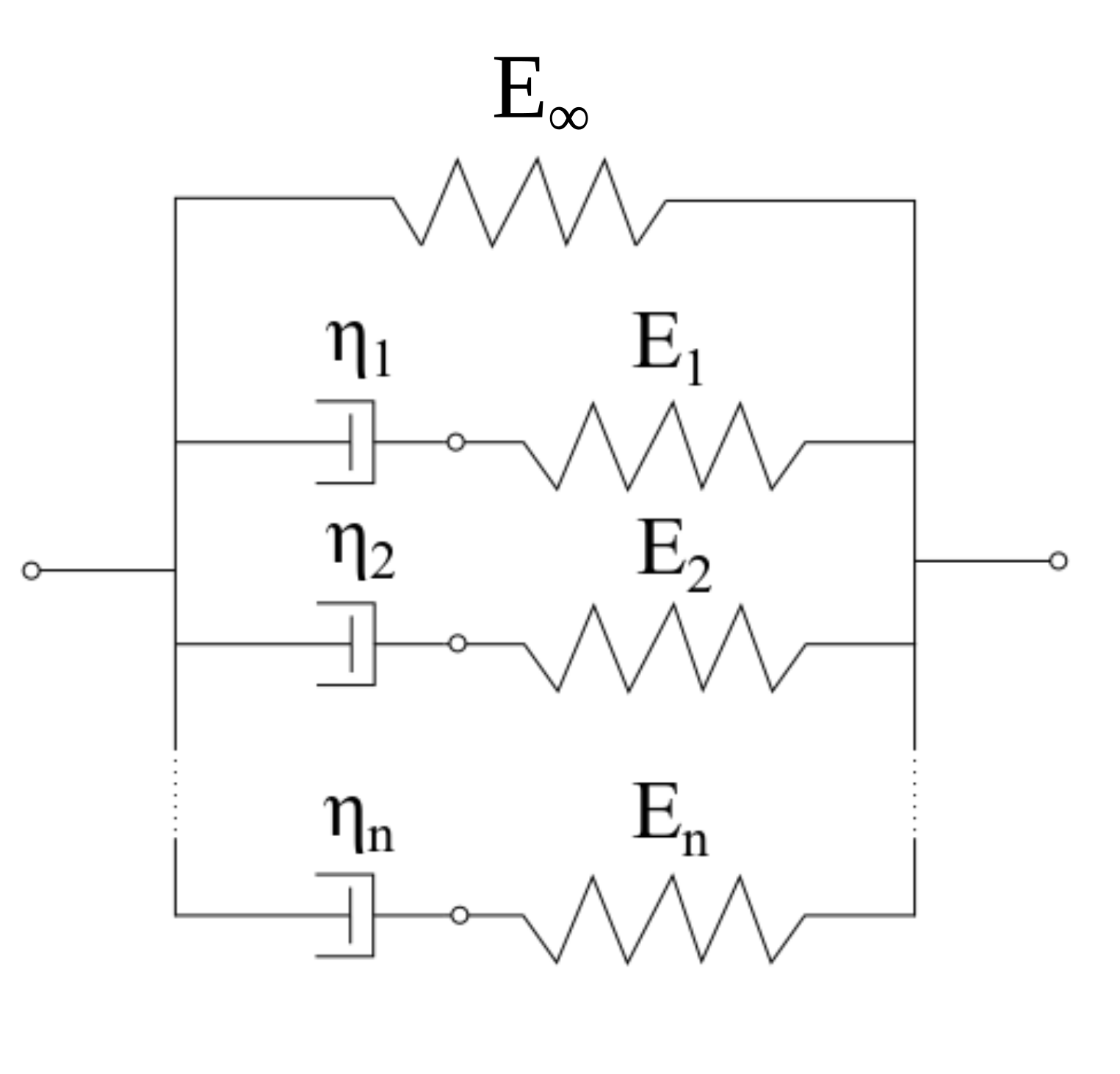
Fig. 19 Schematic representation of the Maxwell chain¶
A different visco-elastic rheological model available to users is the generalized Maxwell chain (see [dBvdB94] and Section 46.7.4 of [dia]). It consists of a series of sequential spring-dashpots (Maxwell elements) placed in parallel with one single spring (see Fig. 19). The relation between stresses and strain comes from
where \(E(t,\tau)\) is the time-dependent relaxation function, \(\tau\) is the loading age, and \(\mathbf{D}\) is the dimensionless matrix relating a 3D deformation state to a 1D relaxation function. The relaxation function is expanded in the exponential series
where the relaxation time of each Maxwell element is defined as \(\lambda_{\alpha}=\eta_{\alpha} / E_{\alpha}\) with \(\eta_{\alpha}\) being the viscosity of a dash-pot. Assuming a constant strain rate within each time step, the analytical integration of the right-hand side of Eq. 4 leads to the following form
with \(\sigma_{\alpha}(t)\) being the internal stress within each Maxwell element, defined as
The first term under the sum sign in above equation could be seen as the effective stiffness of a single Maxwell element multiplied by the matrix \(\mathbf{D}\) and the strain increment \(\Delta \varepsilon\):
Time increment \(Δt\) controls the rate dependency of the effective stiffness. By limit analysis, we find the limiting values of the effective stiffness which are equal to \(E_0\) for infinitely slow loading (\(Δt\) tending to infinity) and \(E_0+ΣE_α\) for infinitely fast (\(Δt\) tending to 0). At the end of each converged time step, the internal stress \(σ_α(t)\) is updated according to
The mandatory parameters for the material file are the following: rho
(density), nu (Poisson’s ratio), Plane_Stress (if set to zero plane
strain, otherwise plane stress), Einf (infinite time Young’s modulus),
Ev (Maxwell elements’ stiffness values stored in a vector), Eta
(dashpots’ viscosity values stored in a vector).
The Maxwell model is applied on the entire strain tensor and does not distinguish between its deviatoric and hydrostatic components. Note that the time step has to be specified for the model using current material both for static and dynamic simulations:
model.setTimeStep(time_step_value);
Plastic¶
Small-Deformation Plasticity¶
Keyword: plastic_linear_isotropic_hardening
Inherits from elastic
Material description with input file:
#input.dat
material plastic_linear_isotropic_hardening [
name = material_name
rho = 1000 # density (Real)
E = 2.1e9 # young's modulus (Real)
nu = 0.4 # poisson's ratio (Real)
h = 0.1 # Hardening modulus (Real)
sigma_y = 1e6 # Yield stress (Real)
]
Energies:
potential: elastic part of the potential energyplastic: dissipated plastic energy (integrated over time)
The small-deformation plasticity is a simple plasticity material formulation which accounts for the additive decomposition of strain into elastic and plastic strain components. This formulation is applicable to infinitesimal deformation where the additive decomposition of the strain is a valid approximation. In this formulation, plastic strain is a shearing process where hydrostatic stress has no contribution to plasticity and consequently plasticity does not lead to volume change. Fig. 20 shows the linear strain hardening elasto-plastic behavior according to the additive decomposition of strain into the elastic and plastic parts in infinitesimal deformation as

Fig. 20 Stress-strain curve for the small-deformation plasticity with linear isotropic hardening.¶
In this class, the von Mises yield criterion is used. In the von Mises yield criterion, the yield is independent of the hydrostatic stress. Other yielding criteria such as Tresca and Gurson can be easily implemented in this class as well.
In the von Mises yield criterion, the hydrostatic stresses have no effect on the plasticity and consequently the yielding occurs when a critical elastic shear energy is achieved.
where \(\sigma_y\) is the yield strength of the material which can be function of plastic strain in case of hardening type of materials and \({\boldsymbol{\sigma}}^{{\mathrm{tr}}}\) is the deviatoric part of stress given by
After yielding \((f = 0)\), the normality hypothesis of plasticity determines the direction of plastic flow which is normal to the tangent to the yielding surface at the load point. Then, the tensorial form of the plastic constitutive equation using the von Mises yielding criterion (see equation 4.34) may be written as
In these expressions, the direction of the plastic strain increment (or equivalently, plastic strain rate) is given by \(\frac{{\boldsymbol{\sigma}}^{{\mathrm{tr}}}}{\sigma_{{\mathrm{eff}}}}\) while the magnitude is defined by the plastic multiplier \(\Delta p\). This can be obtained using the consistency condition which impose the requirement for the load point to remain on the yielding surface in the plastic regime.
Here, we summarize the implementation procedures for the small-deformation plasticity with linear isotropic hardening:
Compute the trial stress:
\[{\boldsymbol{\sigma}}^{{\mathrm{tr}}} = {\boldsymbol{\sigma}}_t + 2G\Delta \boldsymbol{\varepsilon} + \lambda \mathrm{tr}(\Delta \boldsymbol{\varepsilon})\boldsymbol{I}\]Check the Yielding criteria:
\[f = (\frac{3}{2} {\boldsymbol{\sigma}}^{{\mathrm{tr}}} : {\boldsymbol{\sigma}}^{{\mathrm{tr}}})^{1/2}-\sigma_y (\boldsymbol{\varepsilon}^p)\]Compute the Plastic multiplier:
\[\begin{split}\begin{aligned} d \Delta p &= \frac{\sigma^{tr}_{eff} - 3G \Delta P^{(k)}- \sigma_y^{(k)}}{3G + h}\\ \Delta p^{(k+1)} &= \Delta p^{(k)}+ d\Delta p\\ \sigma_y^{(k+1)} &= (\sigma_y)_t+ h\Delta p \end{aligned}\end{split}\]Compute the plastic strain increment:
\[\Delta {\boldsymbol{\varepsilon}}^p = \frac{3}{2} \Delta p \frac{{\boldsymbol{\sigma}}^{{\mathrm{tr}}}}{\sigma_{{\mathrm{eff}}}}\]Compute the stress increment:
\[{\Delta \boldsymbol{\sigma}} = 2G(\Delta \boldsymbol{\varepsilon}-\Delta \boldsymbol{\varepsilon}^p) + \lambda \mathrm{tr}(\Delta \boldsymbol{\varepsilon}-\Delta \boldsymbol{\varepsilon}^p)\boldsymbol{I}\]Update the variables:
\[\begin{split}\begin{aligned} {\boldsymbol{\varepsilon^p}} &= {\boldsymbol{\varepsilon}}^p_t+{\Delta {\boldsymbol{\varepsilon}}^p}\\ {\boldsymbol{\sigma}} &= {\boldsymbol{\sigma}}_t+{\Delta \boldsymbol{\sigma}} \end{aligned}\end{split}\]
We use an implicit integration technique called the radial return method to
obtain the plastic multiplier. This method has the advantage of being
unconditionally stable, however, the accuracy remains dependent on the step
size. The plastic parameters to indicate in the material file are:
\(\sigma_y\) (Yield stress) and h (Hardening modulus). In addition, the
elastic parameters need to be defined as previously mentioned: E (Young’s
modulus), nu (Poisson’s ratio).
Damage¶
In the simplified case of a linear elastic and brittle material, isotropic damage can be represented by a scalar variable \(d\), which varies from \(0\) to \(1\) for no damage to fully broken material respectively. The stress-strain relationship then becomes:
where \(\boldsymbol{\sigma}\),
\(\boldsymbol{\varepsilon}\) are the Cauchy stress and
strain tensors, and \(\boldsymbol{C}\) is the elastic
stiffness tensor. This formulation relies on the definition of an
evolution law for the damage variable. In Akantu, many possibilities
exist and they are listed below.
Marigo¶
Keyword: marigo
Inherits from elastic
Material description with input file:
#input.dat
material marigo [
name = material_name
rho = 1000 # density (Real)
E = 2.1e9 # young's modulus (Real)
nu = 0.4 # poisson's ratio (Real)
Plane_stress = false # Plane stress simplification (bool, only 2D problems)
Yd = 0.1 # Hardening modulus (Random)
Sd = 1. # Damage energy (Real)
]
Energies:
dissipated: energy dissipated in damage
This damage evolution law is energy based as defined by Marigo [Mar81], [Lem96]. It is an isotropic damage law.
In this formulation, \(Y\) is the strain energy release rate, \(Y_d\) the rupture criterion and \(S\) the damage energy. The non-local version of this damage evolution law is constructed by averaging the energy \(Y\).
Mazars¶
Keyword: mazars
Inherits from elastic
Material description with input file:
#input.dat
material mazars [
name = concrete
rho = 3000 # density (Real)
E = 32e9 # young's modulus (Real)
nu = 0.2 # poisson's ratio (Real)
K0 = 9.375e-5 # Damage threshold (Real)
At = 1.15 # Parameter damage traction 1 (Real)
Bt = 10000 # Parameter damage traction 2 (Real)
Ac = 0.8 # Parameter damage compression 1 (Real)
Bc = 1391.3 # Parameter damage compression 2 (Real)
beta = 1.00 # Parameter for shear (Real)
]
Energies:
dissipated: energy dissipated in damage
This law introduced by Mazars [Maz84] is a behavioral model to represent damage evolution in concrete. This model does not rely on the computation of the tangent stiffness, the damage is directly evaluated from the strain.
The governing variable in this damage law is the equivalent strain \(\varepsilon_{{\mathrm{eq}}} = \sqrt{<\boldsymbol{\varepsilon}>_+:<\boldsymbol{\varepsilon}>_+}\), with \(<.>_+\) the positive part of the tensor. This part is defined in the principal coordinates (I, II, III) as \(\varepsilon_{{\mathrm{eq}}} = \sqrt{<\boldsymbol{\varepsilon_I}>_+^2 + <\boldsymbol{\varepsilon_{II}}>_+^2 + <\boldsymbol{\varepsilon_{III}}>_+^2}\). The damage is defined as:
With \(\kappa_0\) the damage threshold, \(A_t\) and \(B_t\) the damage parameter in traction, \(A_c\) and \(B_c\) the damage parameter in compression, \(\beta\) is the shear parameter. \(\alpha_t\) is the coupling parameter between traction and compression, the \(\varepsilon_i\) are the eigenstrain and the \(\varepsilon_{{\mathrm{nd}}\;i}\) are the eigenvalues of the strain if the material were undamaged.
The coefficients \(A\) and \(B\) are the post-peak asymptotic value and the decay shape parameters.
Non-Local Constitutive Laws¶
Continuum damage modeling of quasi-brittle materials undergo significant
softening after the onset of damage. This fast growth of damage causes a loss of
ellipticity of partial differential equations of equilibrium. Therefore, the
numerical simulation results won’t be objective anymore, because the dissipated
energy will depend on mesh size used in the simulation. One way to avoid this
effect is the use of non-local damage formulations. In this approach a local
quantity such as the strain is replaced by its non-local average, where the size
of the domain, over which the quantitiy is averaged, depends on the underlying
material microstructure. Akantu provides non-local versions of many
constitutive laws for damage. Examples are for instance the material
Mazars and the material
Marigo, that can be used in a non-local context. In
order to use the corresponding non-local formulation the user has to define the
non-local material he wishes to use in the text input file:
material constitutive_law_non_local [
name = material_name
rho = $value$
...
]
where constitutive_law_non_local is the name of the non-local constitutive law, e.g. marigo_non_local.
In addition to the material the non-local neighborhood, that should be used for the averaging process needs to be defined in the material file as well:
non_local neighborhood_name weight_function_type [
radius = $value$
...
weight_function weight_parameter [
damage_limit = $value$
...
]
]
for the non-local averaging, e.g. base_wf, followed by the properties of the non-local neighborhood, such as the radius, and the weight function parameters. It is important to notice that the non-local neighborhood must have the same name as the material to which the neighborhood belongs!
The following two sections list the non-local constitutive laws and different type of weight functions available in Akantu.
subsection{Non-local constitutive laws}
Let us consider a body having a volume \(V\) and a boundary \(\Gamma\). The stress-strain relation for a non-local damage model can be described as follows:
with \(\vec{D}\) the elastic moduli tensor, \(\sigma\) the stress tensor, \(\epsilon\) the strain tensor and \(\bar{d}\) the non-local damage variable. Note that this stres-strain relationship is similar to the relationship defined in Damage model except \(\bar{d}\). The non-local damage model can be extended to the damage constitutive laws: Marigo and Mazars.
The non-local damage variable \(\bar{d}\) is defined as follows:
with \(W(\vec{x},\vec{y})\) the weight function which averages local damage variables to describe the non-local interactions. A list of available weight functions and its functionalities in akantu are explained in the next section.
Non-local weight functions¶
The available weight functions in Akantu are follows:
base_weight_function: This weight function averages local damage variables by using a bell-shape function on spatial dimensions.
damaged_weight_function: A linear-shape weight function is applied to average local damage variables. Its slope is determined by damage variables. For example, the damage variables for an element which is highly damaged are averaged over large spatial dimension (linear function including a small slope).
remove_damaged_weight_function: This weight function averages damage values by using a bell-shape function asbase_weight_function, but excludes elements which are fully damaged.
remove_damaged_with_damage_rate_weight_function: A bell-shape function is applied to average local damage variables for elements having small damage rates.
stress_based_weight_function: Non local integral takes stress states, and use the states to construct weight function: an ellipsoid shape. Detailed explanations of this weight function are given in Giry et al. [GD13].
Cohesive Constitutive laws¶
Linear Irreversible Law¶
Keyword: cohesive_linear
Material description with input file:
#input.dat
material cohesive_linear [
name = cohesive
sigma_c = 0.1 # critical stress sigma_c (default: 0)
G_c = 1e-2 # Mode I fracture energy
beta = 0. # weighting parameter for sliding and normal opening (default: 0)
penalty = 0. # stiffness in compression to prevent penetration (α in the text)
kappa = 1. # ration between mode-I and mode-II fracture energy (Gc_II/Gc_I)
contact_after_breaking = true # Activation of contact when the elements are fully damaged
max_quad_stress_insertion = false # Insertion of cohesive element when stress is high
# enough just on one quadrature point
# if false the average stress on facet's quadrature points is used
]

Fig. 21 Irreversible cohesive laws for explicit simulations.¶
Akantu includes the Snozzi-Molinari [SM13] linear irreversible cohesive law (see Fig. 21). It is an extension to the Camacho-Ortiz [CO96] cohesive law in order to make dissipated fracture energy path-dependent. The concept of free potential energy is dropped and a new independent parameter \(\kappa\) is introduced:
where \(G_\mathrm{c, I}\) and \(G_\mathrm{c, II}\) are the necessary works of separation per unit area to open completely a cohesive zone under mode I and mode II, respectively. Their model yields to the following equation for cohesive tractions \(\vec{T}\) in case of crack opening \({\delta}\):
where \(\sigma_\mathrm{c}\) is the material strength along the fracture, \(\delta_\mathrm{c}\) the critical effective displacement after which cohesive tractions are zero (complete decohesion), \(\Delta_\mathrm{t}\) and \(\Delta_\mathrm{n}\) are the tangential and normal components of the opening displacement vector \(\vec{\Delta}\), respectively. The parameter \(\beta\) is a weight that indicates how big the tangential opening contribution is. The effective opening displacement is:
In case of unloading or reloading \(\delta < \delta_\mathrm{max}\), tractions are calculated as:
so that they vary linearly between the origin and the maximum attained tractions. As shown in Fig. 21, in this law, the dissipated and reversible energies are:
Moreover, a damage parameter \(D\) can be defined as:
which varies from 0 (undamaged condition) and 1 (fully damaged condition). This variable can only increase because damage is an irreversible process. A simple penalty contact model has been incorporated in the cohesive law so that normal tractions can be returned in case of compression:
where \(\alpha\) is a stiffness parameter that defaults to zero. The relative contact energy is equivalent to reversible energy but in compression.
The material name of the linear decreasing cohesive law is
material_cohesive_linear and its parameters with their respective default
values are:
sigma_c = 0delta_c = 0beta = 0G_c = 0kappa = 1penalty = 0
where G_c corresponds to \(G_\mathrm{c, I}\). A random number
generator can be used to assign a random \(\sigma_\mathrm{c}\) to each
facet following a given distribution (see
Section Constitutive Laws). Only one parameter between delta_c
and G_c has to be specified. For random \(\sigma_\mathrm{c}\)
distributions, the chosen parameter of these two is kept fixed and the
other one is varied.
The bi-linear constitutive law works exactly the same way as the linear
one, except for the additional parameter delta_0 that by
default is zero. Two examples for the extrinsic and intrinsic cohesive
elements and also an example to assign different properties to
inter-granular and trans-granular cohesive elements can be found in
the folder examples/cohesive_element/.
Linear Cohesive Law with Friction¶
Keyword: cohesive_linear_friction
Material description with input file:
#input.dat
material cohesive_linear_friction [
name = interface
beta = 1 # weighting parameter for sliding and normal opening (default: 0)
G_c = 30e-3 # Mode I fracture energy
penalty = 1.0e6 # stiffness in compression to prevent penetration (α in the text)
sigma_c = 2.0 # critical stress sigma_c (default: 0)
contact_after_breaking = true # Activation of contact when the elements are fully damaged
mu = 0.5 # Maximum value of the friction coefficient
penalty_for_friction = 5.0e3 # Penalty parameter for the friction behavior
]
This law represents a variation of the linear irreversible cohesive of
the previous section, which adds friction. The friction behavior is
approximated with an elasto-plastic law, which relates the friction
force to the relative sliding between the two faces of the cohesive
element. The slope of the elastic branch is called
penalty_for_friction, and is defined by the user, together
with the friction coefficient, as a material property. The friction
contribution evolves with the damage of the cohesive law: it is null
when the damage is zero, and it becomes maximum when the damage is
equal to one. This is done by defining a current value of the
friction coefficient (mu) that increases linearly with the damage, up
to the value of the friction coefficient defined by the user. The
yielding plateau of the friction law is given by the product of the
current friction coefficient and the local compression stress acting
in the cohesive element. Such an approach is equivalent to a
node-to-node contact friction. Its accuracy is acceptable only for
small displacements.
The material name of the linear cohesive law with friction is
material_cohesive_linear_friction. Its additional parameters
with respect to those of the linear cohesive law without friction,
with the respective default values, are:
mu = 0penalty_for_friction = 0
Linear Cohesive Law with Fatigue¶
Keyword: cohesive_linear_fatigue
Material description with input file:
#input.dat
material cohesive_linear_fatigue [
name = cohesive
sigma_c = 1 # critical stress sigma_c (default: 0)
beta = 1 # weighting parameter for sliding and normal opening (default: 0)
delta_c = 1 # Critical displacement
delta_f = 1 # delta_f (normalization of opening rate to alter reloading stiffness after fatigue)
count_switches = true # Count the opening/closing switches per element
]
This law represents a variation of the linear irreversible cohesive law of the previous section, that removes the hypothesis of elastic unloading-reloading cycles. With this law, some energy is dissipated also during unloading and reloading with hysteresis. The implementation follows the work of [NROR01]. During the unloading-reloading cycle, the traction increment is computed as
where \(\dot{\delta}\) and \(\dot{T}\) are respectively the effective opening displacement and the cohesive traction increments with respect to time, while \(K^-\) and \(K^+\) are respectively the unloading and reloading incremental stiffness. The unloading path is linear and results in an unloading stiffness
where \(T_\mathrm{max}\) and \(\delta_\mathrm{max}\) are the maximum cohesive traction and the effective opening displacement reached during the precedent loading phase. The unloading stiffness remains constant during the unloading phase. On the other hand the reloading stiffness increment \(\dot{K}^+\) is calculated as
where \(\delta_\mathrm{f}\) is a material parameter (refer to [VRM15] for more details). During unloading the stiffness \(K^+\) tends to \(K^-\), while during reloading \(K^+\) gets decreased at every time step. If the cohesive traction during reloading exceeds the upper limit given by equation Eq. 5, it is recomputed following the behavior of the linear decreasing cohesive law for crack opening.
Exponential Cohesive Law¶
Keyword: cohesive_exponential
Material description with input file:
#input.dat
material cohesive_exponential [
name = coh1
sigma_c = 1.5e6 # critical stress sigma_c (default: 0)
beta = 1 # weighting parameter for sliding and normal opening (default: 0)
delta_c = 1e-4 # Critical displacement
exponential_penalty = true # Is contact penalty following the exponential law?
contact_tangent = 1.0 # Ratio of contact tangent over the initial exponential tangent
]
Ortiz and Pandolfi proposed this cohesive law in 1999 [OP99b]. The traction-opening equation for this law is as follows:
This equation is plotted in Fig. 22. The term \(\partial{\vec{T}}/ \partial{\delta}\) after the necessary derivation can expressed as
where
As regards the behavior in compression, two options are available: a contact penalty approach with stiffness following the formulation of the exponential law and a contact penalty approach with constant stiffness. In the second case, the stiffness is defined as a function of the tangent of the exponential law at the origin.
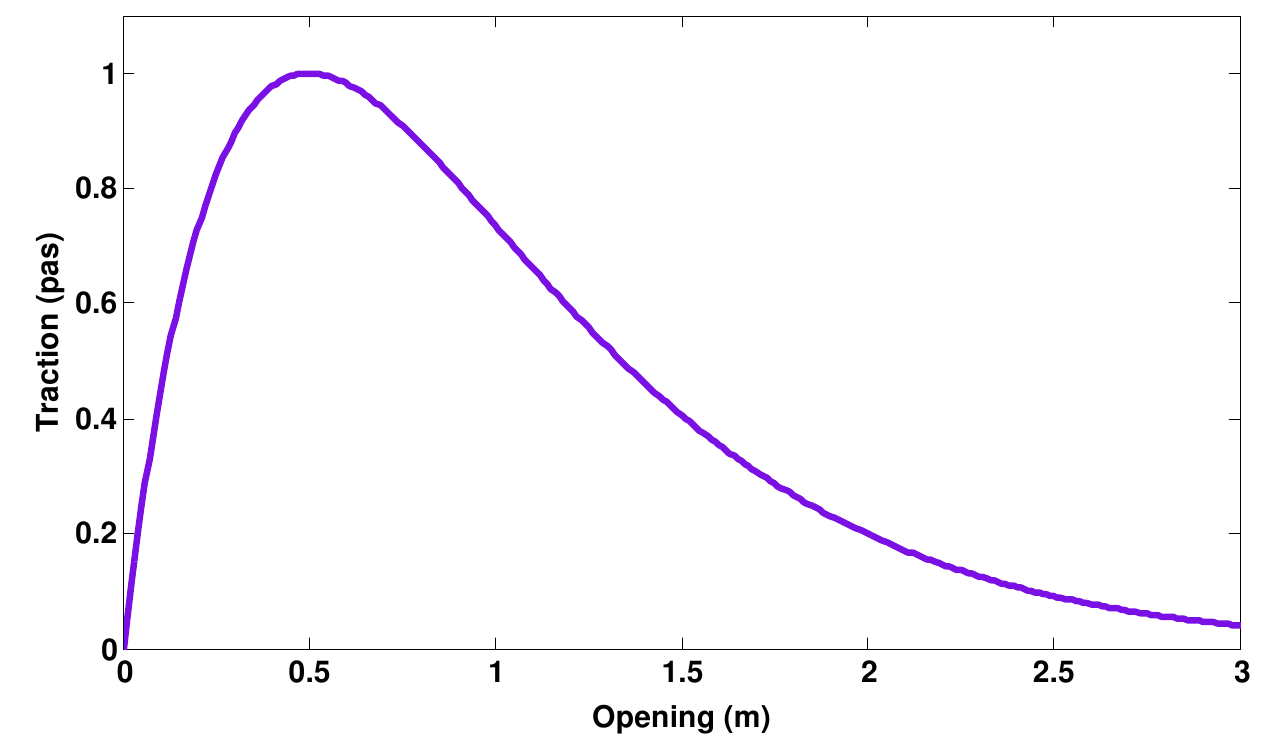
Fig. 22 Exponential cohesive law¶
Adding a New Constitutive Law¶
There are several constitutive laws in Akantu as described in the previous
Section Constitutive Laws. It is also possible to use a user-defined material
for the simulation. These materials are referred to as local materials since
they are local to the example of the user and not part of the Akantu
library. To define a new local material, two files (material_XXX.hh and
material_XXX.cc) have to be provided where XXX is the name of the new
material. The header file material_XXX.hh defines the interface of your
custom material. Its implementation is provided in the material_XXX.cc. The
new law must inherit from the Material class or
any other existing material class. It is therefore necessary to include the
interface of the parent material in the header file of your local material and
indicate the inheritance in the declaration of the class:
auto & solver = model.getNonLinearSolver();
solver.set("max_iterations", 1);
solver.set("threshold", 1e-4);
solver.set("convergence_type", SolveConvergenceCriteria::_residual);
model.solveStep();
/* ---------------------------------------------------------------------- */
#include "material.hh"
/* ---------------------------------------------------------------------- */
#ifndef __AKANTU_MATERIAL_XXX_HH__
#define __AKANTU_MATERIAL_XXX_HH__
namespace akantu {
class MaterialXXX : public Material {
/// declare here the interface of your material
};
In the header file the user also needs to declare all the members of the new material. These include the parameters that a read from the material input file, as well as any other material parameters that will be computed during the simulation and internal variables.
In the following the example of adding a new damage material will be
presented. In this case the parameters in the material will consist of the
Young’s modulus, the Poisson coefficient, the resistance to damage and the
damage threshold. The material will then from these values compute its Lamé
coefficients and its bulk modulus. Furthermore, the user has to add a new
internal variable damage in order to store the amount of damage at each
quadrature point in each step of the simulation. For this specific material the
member declaration inside the class will look as follows:
class LocalMaterialDamage : public Material {
/// declare constructors/destructors here
/// declare methods and accessors here
/* -------------------------------------------------------------------- */
/* Class Members */
/* -------------------------------------------------------------------- */
AKANTU_GET_MACRO_BY_ELEMENT_TYPE_CONST(Damage, damage, Real);
private:
/// the young modulus
Real E;
/// Poisson coefficient
Real nu;
/// First Lame coefficient
Real lambda;
/// Second Lame coefficient (shear modulus)
Real mu;
/// resistance to damage
Real Yd;
/// damage threshold
Real Sd;
/// Bulk modulus
Real kpa;
/// damage internal variable
InternalField<Real> damage;
};
In order to enable to print the material parameters at any point in the user’s example file using the standard output stream by typing:
for (Int m = 0; m < model.getNbMaterials(); ++m)
std::cout << model.getMaterial(m) << std::endl;
the standard output stream operator has to be redefined. This should be done at the end of the header file:
class LocalMaterialDamage : public Material {
/// declare here the interace of your material
}:
/* ---------------------------------------------------------------------- */
/* inline functions */
/* ---------------------------------------------------------------------- */
/// standard output stream operator
inline std::ostream & operator <<(std::ostream & stream, const LocalMaterialDamage & _this)
{
_this.printself(stream);
return stream;
}
However, the user still needs to register the material parameters that
should be printed out. The registration is done during the call of the
constructor. Like all definitions the implementation of the
constructor has to be written in the material_XXX.cc
file. However, the declaration has to be provided in the
material_XXX.hh file:
class LocalMaterialDamage : public Material {
/* -------------------------------------------------------------------- */
/* Constructors/Destructors */
/* -------------------------------------------------------------------- */
public:
LocalMaterialDamage(SolidMechanicsModel & model, const ID & id = "");
};
The user can now define the implementation of the constructor in the
material_XXX.cc file:
/* ---------------------------------------------------------------------- */
#include "local_material_damage.hh"
#include "solid_mechanics_model.hh"
namespace akantu {
/* ---------------------------------------------------------------------- */
LocalMaterialDamage::LocalMaterialDamage(SolidMechanicsModel & model,
const ID & id) :
Material(model, id),
damage("damage", *this) {
AKANTU_DEBUG_IN();
this->registerParam("E", E, 0., _pat_parsable, "Young's modulus");
this->registerParam("nu", nu, 0.5, _pat_parsable, "Poisson's ratio");
this->registerParam("lambda", lambda, _pat_readable, "First Lame coefficient");
this->registerParam("mu", mu, _pat_readable, "Second Lame coefficient");
this->registerParam("kapa", kpa, _pat_readable, "Bulk coefficient");
this->registerParam("Yd", Yd, 50., _pat_parsmod);
this->registerParam("Sd", Sd, 5000., _pat_parsmod);
damage.initialize(1);
AKANTU_DEBUG_OUT();
}
During the intializer list the reference to the model and the material id are
assigned and the constructor of the internal field is called. Inside the scope
of the constructor the internal values have to be initialized and the
parameters, that should be printed out, are registered with the function:
registerParam:
void registerParam(name of the parameter (key in the material file),
member variable,
default value (optional parameter),
access permissions,
description);
The available access permissions are as follows:
- _pat_internal: Parameter can only be output when the material is printed.
- _pat_writable: User can write into the parameter. The parameter is output when the material is printed.
- _pat_readable: User can read the parameter. The parameter is output when the material is printed.
- _pat_modifiable: Parameter is writable and readable.
- _pat_parsable: Parameter can be parsed, i.e. read from the input file.
- _pat_parsmod: Parameter is modifiable and parsable.
In order to implement the new constitutive law the user needs to specify how the additional material parameters, that are not defined in the input material file, should be calculated. Furthermore, it has to be defined how stresses and the stable time step should be computed for the new local material. In the case of implicit simulations, in addition, the computation of the tangent stiffness needs to be defined. Therefore, the user needs to redefine the following functions of the parent material:
void initMaterial();
// for explicit and implicit simulations void
computeStress(ElementType el_type, GhostType ghost_type = _not_ghost);
// for implicit simulations
void computeTangentStiffness(ElementType el_type,
Array<Real> & tangent_matrix,
GhostType ghost_type = _not_ghost);
// for explicit and implicit simulations
Real getStableTimeStep(Real h, const Element & element);
In the following a detailed description of these functions is provided:
initMaterial: This method is called after the material file is fully read and the elements corresponding to each material are assigned. Some of the frequently used constant parameters are calculated in this method. For example, the Lam'{e} constants of elastic materials can be considered as such parameters.computeStress: In this method, the stresses are computed based on the constitutive law as a function of the strains of the quadrature points. For example, the stresses for the elastic material are calculated based on the following formula:\[\mat{\sigma } =\lambda\mathrm{tr}(\mat{\varepsilon})\mat{I}+2 \mu \mat{\varepsilon}\]Therefore, this method contains a loop on all quadrature points assigned to the material using the two macros:
MATERIAL_STRESS_QUADRATURE_POINT_LOOP_BEGINandMATERIAL_STRESS_QUADRATURE_POINT_LOOP_ENDMATERIAL_STRESS_QUADRATURE_POINT_LOOP_BEGIN(element_type); // sigma <- f(grad_u) MATERIAL_STRESS_QUADRATURE_POINT_LOOP_END;
The strain vector in Akantu contains the values of \(\nabla \vec{u}\), i.e. it is really the displacement gradient,
computeTangentStiffness: This method is called when the tangent to the stress-strain curve is desired (see Fig ref {fig:smm:AL:K}). For example, it is called in the implicit solver when the stiffness matrix for the regular elements is assembled based on the following formula:\[\label{eqn:smm:constitutive_elasc} \mat{K } =\int{\mat{B^T}\mat{D(\varepsilon)}\mat{B}}\]Therefore, in this method, the
tangentmatrix (mat{D}) is computed for a given strain.The
tangentmatrix is a \(4^{th}\) order tensor which is stored as a matrix in Voigt notation.
Fig. 23 Tangent to the stress-strain curve.¶
getCelerity: The stability criterion of the explicit integration scheme depend on the fastest wave celerity~eqref{eqn:smm:explicit:stabletime}. This celerity depend on the material, and therefore the value of this velocity should be defined in this method for each new material. By default, the fastest wave speed is the compressive wave whose celerity can be defined ingetPushWaveSpeed.
Once the declaration and implementation of the new material has been completed, this material can be used in the user’s example by including the header file:
#include "material_XXX.hh"
For existing materials, as mentioned in Section~ref{sect:smm:CL}, by
default, the materials are initialized inside the method
initFull. If a local material should be used instead, the
initialization of the material has to be postponed until the local
material is registered in the model. Therefore, the model is
initialized with the boolean for skipping the material initialization
equal to true:
/// model initialization
model.initFull(_analysis_method = _explicit_lumped_mass);
Once the model has been initialized, the local material needs to be registered in the model:
model.registerNewCustomMaterials<XXX>("name_of_local_material");
Only at this point the material can be initialized:
model.initMaterials();
A full example for adding a new damage law can be found in
examples/new_material.
Adding a New Non-Local Constitutive Law¶
In order to add a new non-local material we first have to add the local
constitutive law in Akantu (see above). We can then add the non-local version
of the constitutive law by adding the two files (material_XXX_non_local.hh
and material_XXX_non_local.cc) where XXX is the name of the
corresponding local material. The new law must inherit from the two classes,
non-local parent class, such as the MaterialNonLocal class, and from the
local version of the constitutive law, i.e. MaterialXXX. It is therefore
necessary to include the interface of those classes in the header file of your
custom material and indicate the inheritance in the declaration of the class:
/* ---------------------------------------------------------------------- */
#include "material_non_local.hh" // the non-local parent
#include "material_XXX.hh"
/* ---------------------------------------------------------------------- */
#ifndef __AKANTU_MATERIAL_XXX_HH__
#define __AKANTU_MATERIAL_XXX_HH__
namespace akantu {
class MaterialXXXNonLocal : public MaterialXXX,
public MaterialNonLocal {
/// declare here the interface of your material
};
As members of the class we only need to add the internal fields to store the non-local quantities, which are obtained from the averaging process:
/* -------------------------------------------------------------------------- */
/* Class members */
/* -------------------------------------------------------------------------- */
protected:
InternalField<Real> grad_u_nl;
The following four functions need to be implemented in the non-local material:
/// initialization of the material
void initMaterial();
/// loop over all element and invoke stress computation
virtual void computeNonLocalStresses(GhostType ghost_type);
/// compute stresses after local quantities have been averaged
virtual void computeNonLocalStress(ElementType el_type, GhostType ghost_type)
/// compute all local quantities
void computeStress(ElementType el_type, GhostType ghost_type);
In the intialization of the non-local material we need to register the local quantity for the averaging process. In our example the internal field grad_u_nl is the non-local counterpart of the gradient of the displacement field (grad_u_nl):
void MaterialXXXNonLocal::initMaterial() {
MaterialXXX::initMaterial();
MaterialNonLocal::initMaterial();
/// register the non-local variable in the manager
this->model->getNonLocalManager().registerNonLocalVariable(
this->grad_u.getName(),
this->grad_u_nl.getName(),
spatial_dimension * spatial_dimension);
}
The function to register the non-local variable takes as parameters the name of the local internal field, the name of the non-local counterpart and the number of components of the field we want to average. In the computeStress we now need to compute all the quantities we want to average. We can then write a loop for the stress computation in the function computeNonLocalStresses and then provide the constitutive law on each integration point in the function computeNonLocalStress.